Artificial Limbs Assignment Sample
Learn about prosthetics' role in restoring function and aesthetics with guidance from Rapid Assignment Help top-notch experts!

- Type Assignment
- Downloads5904
- Pages6
- Words1424
Introduction
Get free samples written by our Top-Notch subject experts for taking online Assignment Help services.
A prosthesis "plural: prostheses; from Ancient Greek prosthesis, addition, application, attachment" or prosthetics implantation is indeed an automatic machine that substitutes a defective bodily component that may have been injured due to accident, infection, or even a congenital problem. A prosthesis is an artificial alternative or substitution for a physical component including a tooth, eyes, a face structure, the palette, hips, knees or some other joints, limb, arms, and so forth. A prosthesis is created for either practical or aesthetic purposes, or even for either.

.jpg)
Figure 1: Artificial Limbs
A prosthesis is a man-made augmentation which substitutes a lost bodily component. It is indeed a subfield of bio-mechatronics, and that is the study of merging mechanical equipment into muscle attachments, bone, including neurological processes in order to help or increase motor function impaired due to accident, sickness, or malfunction. Hips, knees, elbows, ankles, as well as joints of finger are examples of common joint prosthesis. Prosthetic implantation can indeed be joint components, including a solitary knee. The terms "joint restoration" and "arthroplasty" refer to replacement of joints as well as arthroplasty.
Self-contained Devices
Engineered Structure
The prosthesis that are controlled by the devices that are self-contained makes use of the mechanism of the slider crank. In the slider crank two screw assemblies of motor ball that are driven by motors have been used for actuation of the joints of knees and ankles. Each actuation unit possesses “Maxon EC30 Powermax brushless motor” and are connected to ball screws. The actuation unit of the ankle incorporates the spring made of stainless steel with active coils that are placed parallel to the ball screw. Every actuation unit also incorporates a load cell that is uniaxial which is connected towards the units in series enabling closed - loop system force sensors of such a ball screw system (Petlock et al. 2021). Both of the ankle and knee parts include bronze fasteners as well as precise potentiometers incorporated for joint variables measuring. Between both the knee as well as the sockets connection is a tension flexion moments sensor to detect the force between both the sockets as well as prosthetic. The ankle links to a bespoke feet plan that provides pressure gauges to record site response stresses just on base as well as heels of the feet. The prosthesis's centre cylindrical component contains as well as shields a lithium-polymer charging while also serving as a point of connection for such embedded software components. The ankle joints are situated somewhat forward to the midline of the central core to best fit inside an anthropomorphic framework. The extent of the shank section is adjusted by adjusting 3 parts: the bottom shank elongation, the springs pull-down, as well as the coupling between both the ball nuts and also the ankles. The pyramidal connection, which is placed into the sagittal pressure load cell enabling linking the prosthetic towards the sockets, provides further flexibility.
Get assistance from our PROFESSIONAL ASSIGNMENT WRITERS to receive 100% assured AI-free and high-quality documents on time, ensuring an A+ grade in all subjects.
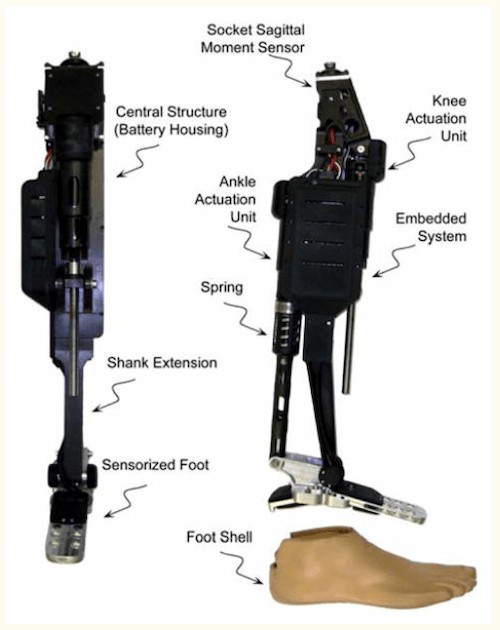
Figure 2: Frontal and Side Views of Transfemoral Prosthesis
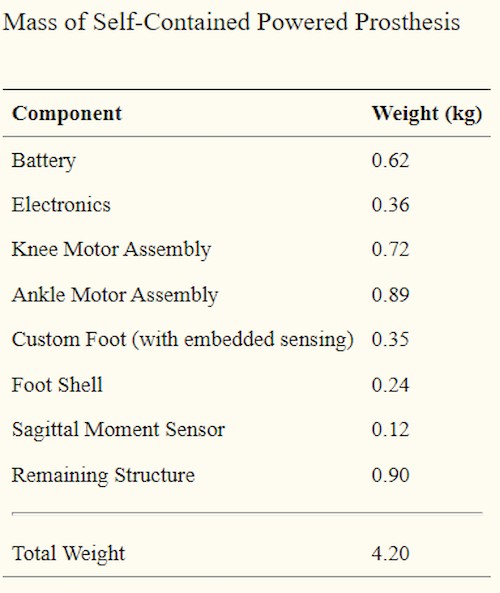
Figure 3: Masses of Prosthesis that are powered by self-contained devices
Automations
The embedded microcontroller system contained in the prosthesis which helps in allowing for operations of tethered or untethered (Liu et al. 2020). This system consists of different modules like signal processing, computation, power supply, communication, interfaces and power electronics. The battery used to power up the whole system is made up of lithium polymer. For maintaining noise levels that are low, voltages are provided to the signal electronics by regulators that are linear. Before utilizing the linear regulators, the voltage of the battery is reduced by the switching amplifiers of PWM. A microcontroller which operates a solid phase relay could be used to turn off the electricity. The battery condition is displayed via LED indicators which are also regulated mostly by microcontrollers. The embedded system procured analogue sensed data from the prosthetic limb detectors (five deformations gauge transmissions as well as two potentiometer indicators), analogue signals of reference from the personal laptop used only for tethered activity, as well as indicators evaluated just on platform such as rechargeable batteries voltages and currents, ankle and knee motor amplification current flow, as well as a 3-axis accelerometer (Saraiji et al. 2018, October). The sensing impulses from the prosthesis have been filtered utilizing inputting instrument amplifiers AD8220. The fluxes of the batteries, knee motors, as well as ankle motors are detected using current sensor between resistance as well as current sensing amplifiers LT1787HV.
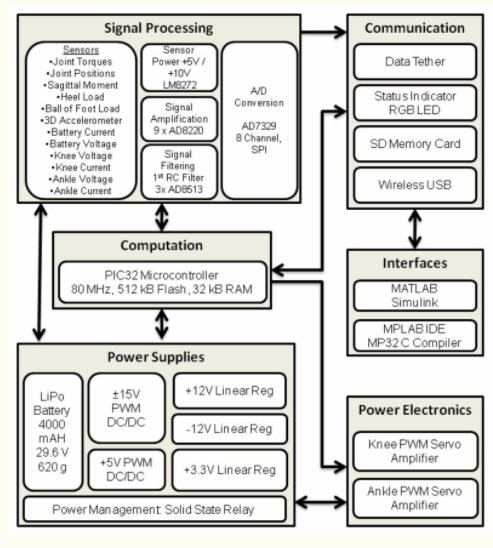
Figure 4: Framework for embedded Systems
The sensing impulses from the prosthesis have been filtered utilizing inputting instrument amplifiers AD8220 (Attallah et al. 2020). The fluxes of the batteries, knee motors, as well as ankle motors are detected using current sensor between resistance as well as current sensing amplifiers LT1787HV. Even before analogue-to-digital phase for conversion, the impulses are screened with the first RC filter for advert strain gauges as well as joint angles as well as for sagittal instant, soles, and feet ball specially made load cells, and solubilized with elevated fast switching speed amps. Two 8-channel analogues to digitized converters provide the analogue - to - digital transformation AD7329. The data from the ac to dc is sent to the microcontroller through the SPI channel (Bumbaširević et al. 2020). The main element for computation is the PIC 32 Microcontroller which is programmed with the help of C programming language in MPLAB IDE as well as MP 32 Compiler. On the microcontroller, the controller of the prosthesis is implemented. A tether can control prosthesis by a MATLAB Simulator. The microprocessor conducts the actuator as well as activities control of the prostheses while also logging sensor information each 5 Ms in the unrestrained operational conditions. The microcontroller controls the actuator amps within connected operating mode using analogue reference voltage from the laptop (Bjånes et al. 2019). A SD storage medium is utilised to preserve time-stamped sensed data as well as inner controller’s statistics each 5 Ms. The USB connection is used to connect the SD card to the laptop. In the 2nd and 4th regions of the velocity/torque curves, the microcontroller provides PWM reference voltage for two 4 quarter brushless motor driver circuit AZBC 20A8 with constant as well as maximum power capacity as well as regeneration abilities. The embedded system printable circuitry is a four-layer panel that uses surface - mounted technique (SMT) elements. he embedded circuit weighs 0.36 kg, which includes the boards as well as parts (0.10 kg), motor amps (0.19 kg), as well as a protection shell (0.07 kg).
Operations and Control
The prosthesis's proposed control framework is split into 3 tiers. The intended recognition system, a top ranked supervising regulator, insinuates the user's purpose based just on user interactions, the prosthesis as well as changes the intermediate level regulators accordingly (Khan et al. 2019). Intention identification is accomplished first by creating a database including sensor information from various action patterns, subsequently developing a pattern recognition system which transitions amongst action mechanisms instantaneously. For every mode of activity, like moving, resting, relaxing, as well as staircase climb, a mid - level regulator is created. The torque standards for the hinges are generated by the intermediate level actuators to use a state machine that is finite which modifies the susceptibility of the hinges based just on phases of the gait. The reduced control systems seem to be shuttered joint torque control systems that help make up for such incidence rate of the lead screw and therefore facilitate monitoring of the ankle and knee combined torque
Recently Downloaded Samples by Customers
Introduction to Human Resource Assignment in the COVID-19 Era This assignment is based on the workplace flexibility that has...View and Download
Introduction to Operations and Project Management Assignment In this research, Burberry Group Plc’s operations and...View and Download
Introduction : Aspect Of Tort Get free samples written by our Top-Notch subject experts for taking assignment helper...View and Download
Introduction: Bsc (Hons) Business Management With Foundation...View and Download
Introduction - Data Analytics Project: Python Programming & Insights assignment sample In this report, the authors...View and Download
1.0 Introduction to Professional Skills Assignment 1.1 Overview of the Report Purpose The purpose of this report is to review...View and Download